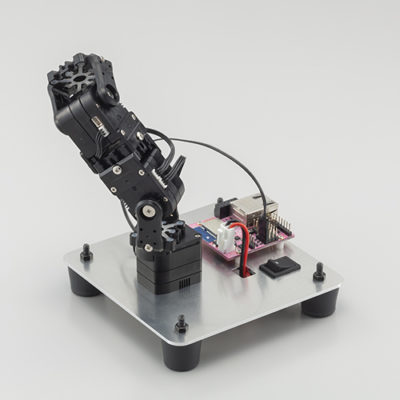
近藤科学 6自由度 ロボットアーム
(税込) 送料込み
商品の説明
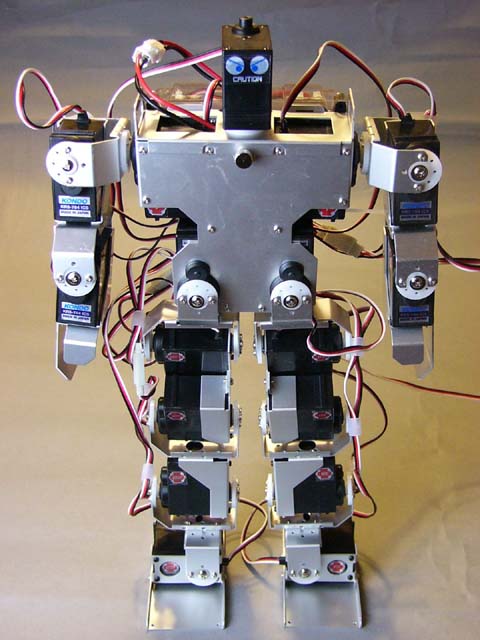
近藤科学の教育基本セットをベースに製作した6自由度ロボットアームです。
サーボモータは近藤科学のロボット専用サーボKRS-786ICS()が6個(分)
近藤科学の二足歩行ロボット用コントロールボードRCB-1で、ソフトウェアは近藤科学のハートトゥハート(近藤科学サポートページからダウンロード可能)
ハンド部分は歯車で開閉する様になっています。
数値を打ち込んでプログラムもできますし、教示機能(ティーチング)で簡単に動きを作る事も可能です。
バッテリーはホビーラジコン用の7.2Vバッテリーが置ける設計になっています。付属しませんので適当なバッテリーをご用意下さい。電圧は4.8V〜8.4Vなら大丈夫です。
土台の四隅に鉄の錘が付いており安定させています。
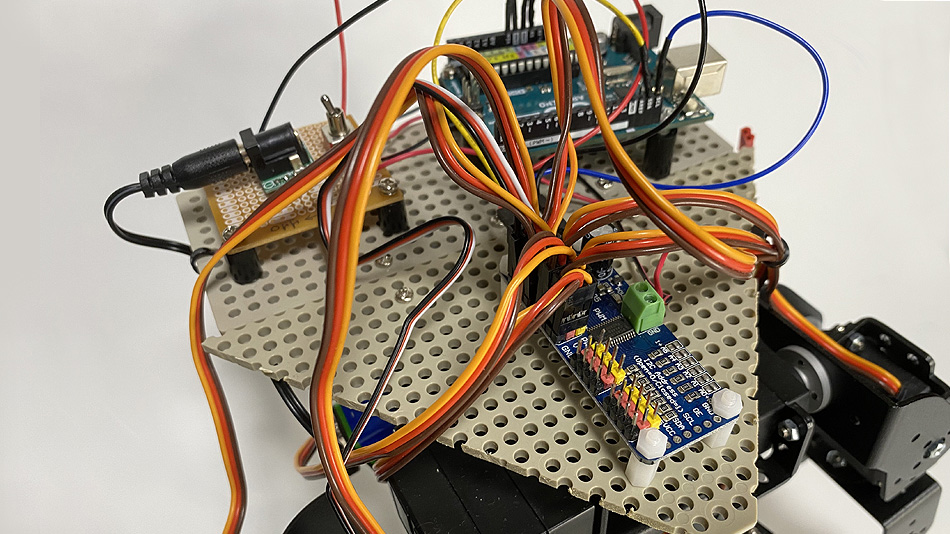
サーボモータはPWMで動きますので、コントロールボードをarduinoなどの別のマイコンボードに載せ換えても遊ぶ事ができます。商品の情報
| カテゴリー | おもちゃ・ホビー・グッズ > おもちゃ > ホビーラジコン |
|---|---|
| 商品の状態 | 目立った傷や汚れなし |

近藤科学 6自由度ロボットアーム www.polikovrecruitmentsolutions.com

近藤科学 6自由度ロボットアーム www.polikovrecruitmentsolutions.com

【 ロボットアーム組立キット】近藤科学 KXR-A5 アーム型 Ver.2

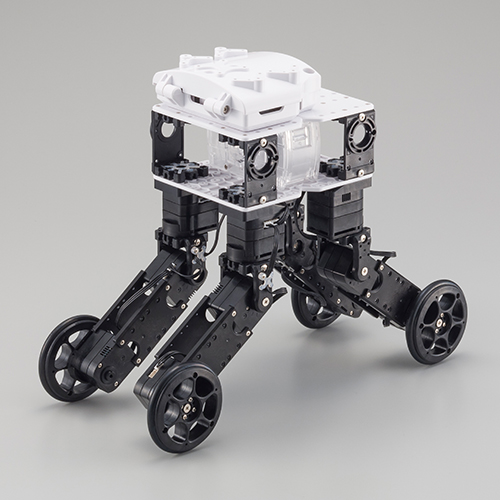
多脚ロボット | 近藤科学

2023年最新】近藤科学 サーボの人気アイテム - メルカリ

【 ロボットアーム組立キット】近藤科学 KXR-A5 アーム型 Ver.2

多脚ロボット | 近藤科学

【 ロボットアーム組立キット】近藤科学 KXR-A5 アーム型 Ver.2

KXRシリーズ | 近藤科学

【 ロボットアーム組立キット】近藤科学 KXR-A5 アーム型 Ver.2
アームロボット | 近藤科学

【 ロボットアーム組立キット】近藤科学 KXR-A5 アーム型 Ver.2

【 ロボットアーム組立キット】近藤科学 KXR-A5 アーム型 Ver.2
KONDOロボットキットカタログ(近藤科学株式会社)のカタログ無料

知育玩具 ロボットアームの人気商品・通販・価格比較 - 価格.com

逆運動学】6自由度ロボットアームの解析解法(幾何解法) #Python - Qiita

KXR-L2を改造し自律動作可能なロボットを作る:HAC入門編 Part.3

近藤科学 ロボット KXRシリーズ アーム型Ver.2 03157 1個 3-9317-02(直送品)

Amazon | 【 ロボットアーム組立キット】近藤科学 KXR-A5 アーム型 Ver
ROS対応 台車用ロボットアーム AMIR 740 : ロボットショップ / Robot
2足歩行ロボットの制作
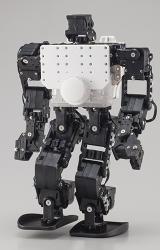
公認ロボット - ROBO-ONE -

7-dof_arm.jpg
2足歩行ロボットの制作
![Cで実装する「実践ロボット制御」[1] 〜内容紹介とセットアップ](https://rt-net.jp/humanoid/wp-content/uploads/2020/06/IMG_0041-scaled-e1592360683733.jpg)
Cで実装する「実践ロボット制御」[1] 〜内容紹介とセットアップ
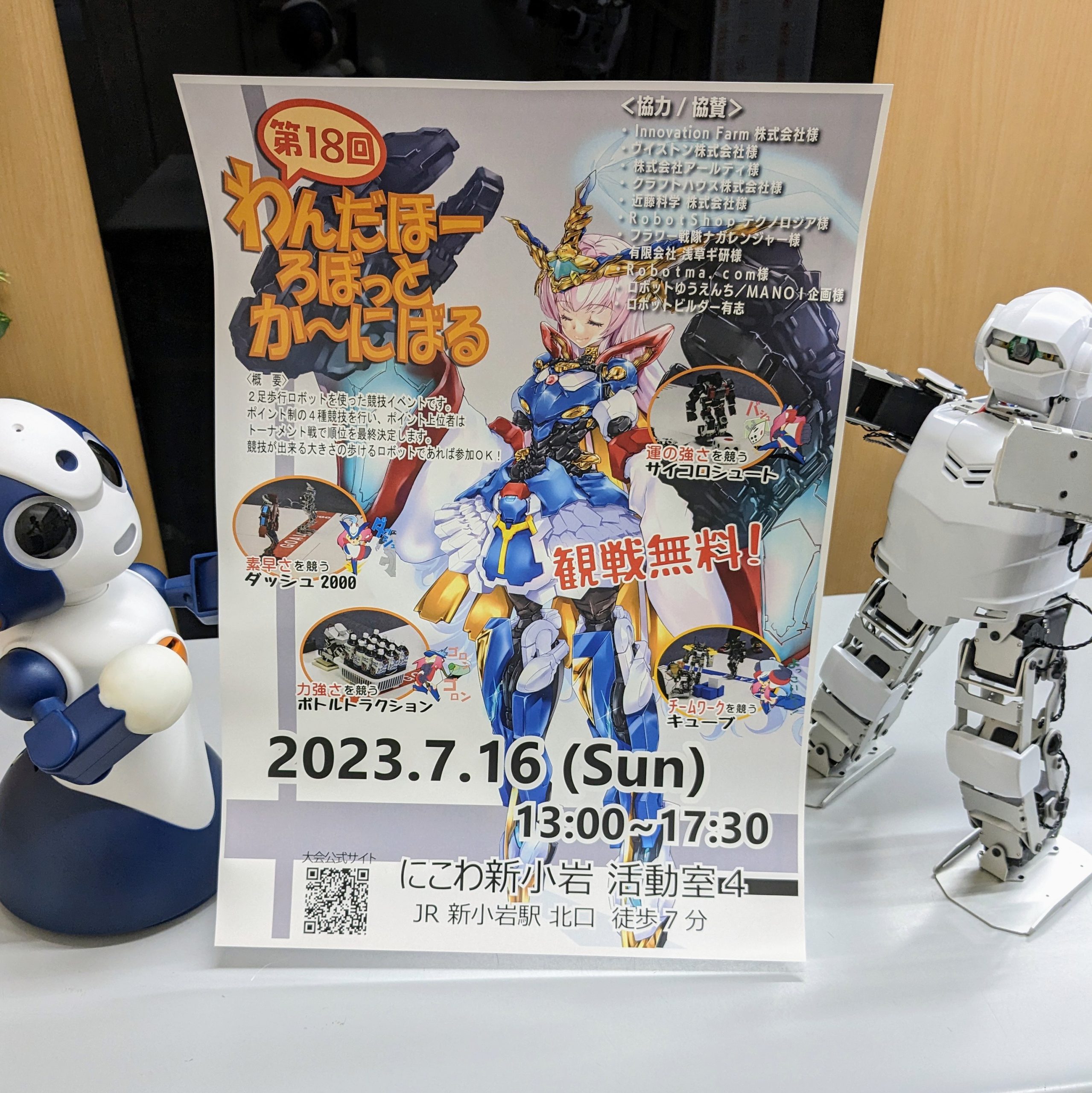
第18回 わんだほーろぼっとかーにばるのお知らせ | ロボット専門店の

ロボット製品 | ニデックインスツルメンツ株式会社
石井英男のDigital Life
RC サーボモータを用いた 6 自由度肩義手の 協調動作制御システムの開発

近藤科学 6自由度 ロボットアーム - ホビーラジコン

逆運動学】6自由度ロボットアームの解析解法(幾何解法) #Python - Qiita
データ抽象化を用いた制御アルゴリズム簡単化によるロボットの多種
公認ロボット - ROBO-ONE -
KXRカリキュラムのお知らせ | 近藤科学

知育玩具 ロボットアームの人気商品・通販・価格比較 - 価格.com

【 ロボットアーム組立キット】近藤科学 KXR-A5 アーム型 Ver.2

小泉 憲裕の研究ブログ: 4. 医デジ化のためのロボット機構技術

産業用ロボット特集可搬質量10~20kg | 特集 | MEKASYS(メカシス)

近藤科学、6脚歩行ロボット組立キット「KMR-M6」を発表 | TECH+

Raspberry Piを使ったロボットのための開発環境構築: HAC入門編 Part.7



商品の情報
メルカリ安心への取り組み
お金は事務局に支払われ、評価後に振り込まれます
出品者
スピード発送
この出品者は平均24時間以内に発送しています














